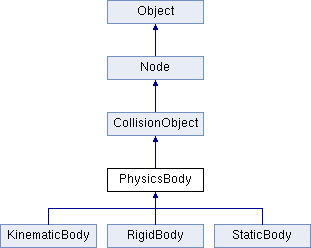
Base class for 3D game objects affected by physics.
|
| virtual void | setVelocity (const vec3 &velocity) |
| |
| virtual void | setGravityFactor (float factor) |
| |
| void | setBounce (float value) const |
| |
| void | setMass (float value) const |
| |
| virtual vec3 | getVelocity () const |
| |
| void | applyForce (const vec3 &force) const |
| |
| void | applyForce (const vec3 &force, const vec3 &position) const |
| |
| auto | getCollisionLayer () const |
| |
| virtual void | setCollisionLayer (uint32_t layer) |
| |
| auto | sharedPtr () |
| |
| bool | wereInContact (const CollisionObject *obj) const |
| |
| | Node (const Node &orig) |
| |
| | Node (const string &nodeName="Node", Type type=NODE) |
| |
| virtual void | onReady () |
| |
| virtual void | onEnterScene () |
| |
| virtual void | onExitScene () |
| |
| virtual void | onProcess (const float alpha) |
| |
| virtual void | onPhysicsProcess (const float delta) |
| |
| virtual bool | onInput (InputEvent &inputEvent) |
| |
| const mat4 & | getTransformLocal () const |
| |
| const mat4 & | getTransformGlobal () const |
| |
| vec3 | toGlobal (vec3 local) const |
| |
| vec3 | toLocal (vec3 global) const |
| |
| virtual void | setPosition (vec3 position) |
| |
| vec3 | getPosition () const |
| |
| void | translate (const vec3 &localOffset) |
| |
| virtual void | setPositionGlobal (const vec3 &position) |
| |
| vec3 | getPositionGlobal () const |
| |
| void | rotate (quat quaternion) |
| |
| void | rotateTowards (const quat &targetRotation, float maxAngle) |
| |
| void | rotateX (float angle) |
| |
| void | rotateY (float angle) |
| |
| void | rotateZ (float angle) |
| |
| void | setRotation (const quat &quater) |
| |
| void | setRotationGlobal (const quat &quater) |
| |
| void | setRotation (const vec3 &rot) |
| |
| void | setRotationX (float angle) |
| |
| void | setRotationY (float angle) |
| |
| void | setRotationZ (float angle) |
| |
| vec3 | getRotation () const |
| |
| vec3 | getRotationGlobal () const |
| |
| quat | getRotationQuaternion () const |
| |
| quat | getRotationQuaternionGlobal () const |
| |
| float | getRotationX () const |
| |
| float | getRotationY () const |
| |
| float | getRotationZ () const |
| |
| virtual void | setScale (const vec3 &scale) |
| |
| void | setScale (float scale) |
| |
| vec3 | getScale () const |
| |
| vec3 | getScaleGlobal () const |
| |
| ProcessMode | getProcessMode () const |
| |
| void | setProcessMode (const ProcessMode mode) |
| |
| bool | isProcessed () const |
| |
| Node * | getParent () const |
| |
| bool | addChild (shared_ptr< Node > child, bool async=false) |
| |
| bool | removeChild (const shared_ptr< Node > &child, bool async=false) |
| |
| void | removeAllChildren (bool async=false) |
| |
| bool | haveChild (const shared_ptr< Node > &child, bool recursive) const |
| |
| template<typename T = Node> |
| shared_ptr< T > | getChild (const string &name) const |
| |
| template<typename T = Node> |
| shared_ptr< T > | getChildByPath (const string &path) const |
| |
| template<typename T = Node> |
| shared_ptr< T > | findFirstChild (const string &name) const |
| |
| void | printTree (int tab=0) const |
| |
| string | toString () const override |
| |
| id_t | getId () const |
| |
| shared_ptr< Node > | duplicate (bool recursiveFilter=false) const |
| |
| template<typename T = Node> |
| shared_ptr< T > | makeFrom () |
| |
| template<typename T > |
| shared_ptr< T > | findFirstChild (const bool recursive=true) const |
| |
| template<typename T > |
| list< shared_ptr< T > > | findAllChildren (const bool recursive=true) const |
| |
| template<typename T = Node> |
| list< shared_ptr< T > > | findAllChildrenByGroup (const string &groupName, const bool recursive=true) const |
| |
| vec3 | getRightVector () const |
| |
| vec3 | getLeftVector () const |
| |
| vec3 | getFrontVector () const |
| |
| vec3 | getBackVector () const |
| |
| vec3 | getUpVector () const |
| |
| vec3 | getDownVector () const |
| |
| template<typename T > |
| shared_ptr< Tween > | createPropertyTween (PropertyTween< T >::Setter set, T initial, T final, float duration, const TransitionType ttype=TransitionType::LINEAR, const Tween::Callback &callback=nullptr) |
| |
| void | killTween (const shared_ptr< Tween > &tween) |
| |
| virtual void | setProperty (const string &property, const string &value) |
| |
| void | setName (const string &nodeName) |
| |
| const list< shared_ptr< Node > > & | getChildren () const |
| |
| Type | getType () const |
| |
| const string & | getName () const |
| |
| string | getPath () const |
| |
| const list< string > & | getGroups () const |
| |
| void | addToGroup (const string &group) |
| |
| void | removeFromGroup (const string &group) |
| |
| bool | isInGroup (const string &group) const |
| |
| bool | isVisible () const |
| |
| virtual void | setVisible (bool visible=true) |
| |
| bool | isInsideTree () const |
| |
| void | setCastShadows (bool castShadows) |
| |
| void | connect (const Signal::signal &name, const Signal::Handler &handler) |
| |
| void | connect (const Signal::signal &name, const function< void ()> &handler) |
| |
| void | emit (const Signal::signal &name, void *params=nullptr) |
| |
| virtual string | toString () const |
| |
 Public Member Functions inherited from CollisionObject
Public Member Functions inherited from CollisionObject